Available courses

2nd Mobility Period - Thessaloniki
This "course" provides information about and describes the activities of the 2nd mobility period in Thessaloniki, Greece from May 23rd, 2022 until June 5th, 2022.
SMARTSEA Teachers' Contact Information
In this section you can find each SMARTSEA teacher's contact information
TS1.1 Maritime Control Systems
The course will focus on the analysis of the marine control systems (motion control, positioning, maneuvering, machinery systems and propulsion systems) of ships, underwater vehicles and floating marine structures. Basic marine electronic control systems will be described, like the electric power generation & management, steering, thruster and propulsion systems etc.
TS1.2 Marine Surveying
Like all marine surveyors, deep sea and underwater surveyors are hired to assess, report on and recommend solutions for any number of issues arising for owners and operators of commercial ships, either at sea or in port. Deepsea vessel surveyors will often be able to offer services for draft surveys, on/off hire condition surveys and damage investigations, pre-purchase surveys, P&I surveys, stability surveys, stowage and lashing, loading supervision, and marine insurance surveys to name a few.
TS1.3 NI LabVIEW Training
The LabVIEW Training course is an introduction to National Instruments’ LabVIEW graphical programming language for data acquisition and control. Topics covered include creating, editing, and executing programs using the LabVIEW interface. The course will set for the participants the bases for programming and utilizing practical data acquisition structures as well as sensor control circuits. The practical idea of real time processing, essential for surveying systems, will be introduced and the necessary knowledge in order to understand the demonstrator phase of the course will be provided. Successful attendance of the course will also lead to an appropriate certification by National Instruments.
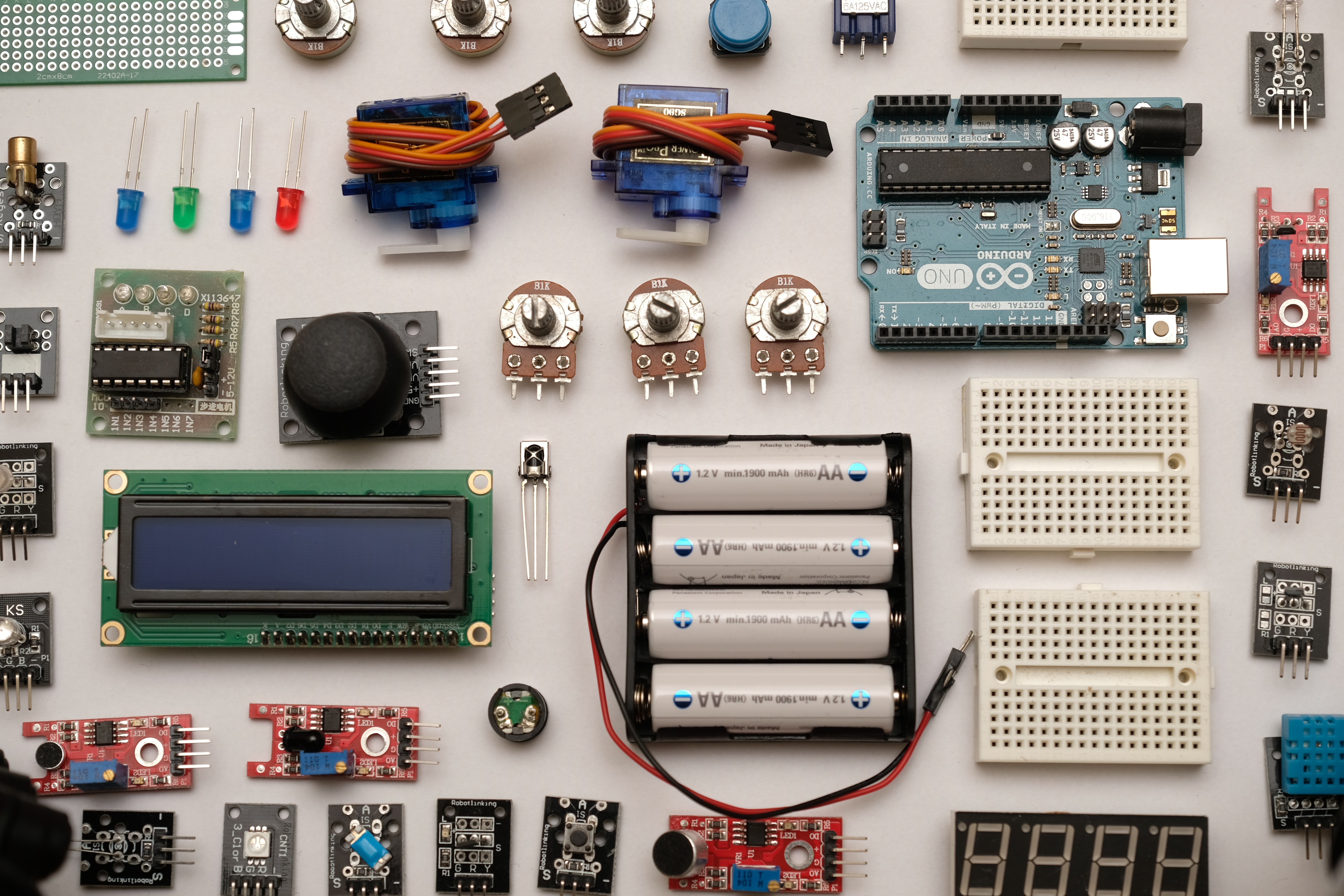
TS1.4 Data Acquisition & Sensors
This topic focuses on data acquisition circuits and systems, an essential part of control networks. Sensors, such as voltage/current sensors, temperature, pressure and modern sensoring systems are analysed together with their connectivity with on-board diagnostic systems. An appropriately designed laboratory session by means of the NI LabVIEW graphical interface will complete the course. Moreover, this course provides the basics for the understanding of “NI LabVIEW Training” course. Emphasis is given to sensor technology and implementation related to marine environment evaluation, like pH, salinity, temperature, pressure etc. Connectivity of the sensors with the ROUV is analysed. Manual and automated use of the sensors are mentioned and explained.
TS1.5 IoT Platforms & Systems
The course provides an insight to Internet-of-Things theory and its implementation to automation. Sensor and actuator interconnection, corresponding wireless protocols (WiFi, BLE, ZigBee, Z-Wave etc) and IoT platforms (OpenHAB) are described introducing the students to the basic elements of the IoT architecture. As a result, decision making through automated procedures will be taught.

TS1.6 ROUV Electric System
The fundamentals of the ROUV electric system are analyzed in this course. It is initiated by the very basics of electric circuitry focusing on the electric sources simple equivalent circuits. ROUV battery technology, the time autonomy of the ROUV as well as additional to the sources, the electric loads of the ROUV are defined and analyzed. Sources - loads real connections, controlling software setup and ROUV test drive in a water environment (probable at the sea) will be part of the course's laboratory session, where students will have the opportunity to connect theory with practical ROUV implementation and data/images/video compilation.
Small but significant part of the course play the techniques for autonomously navigating a remotely operated underwater vehicle.
TS1.7 Artificial Intelligence
AI is an enabling technology, critical for the data analytics and the systems’ modelling. Once the data is provided by the IoT technology, it is necessary to process it and extract the valuable information it can contain, in order to offer a proper response (by the means of inferring new knowledge, suggest an action or provide an automated M2M -machine to machine- response).

TS1.8 Marine Environment
Marine pollution is a combination of chemicals, biological waste, noise and trash that has harmful effects on the natural environment and is a result of human activity. This course focuses on ship-based pollutants. The objective of this course is to give the students overview of the maritime environment, the main sources of pollution, their impact to marine ecosystems and legislative base for preventing marine pollution.
TS1.9 Safety at Work on Sea
The aim of the introductory module is to give course participants offshore safety awareness. The important point is to educate students to a safe working practice on a boat at sea.
TS1.10 Diving Observation Techniques
In deep waters the navigation system of an Autonomous Underwater Vehicle (AUV) is crucial because of the unavailability of precise navigation system line (Global Navigation Satellite System - GNSS). Most of the high performance navigation capabilities are ensured by the high grade Inertial Navigation Systems (INS) aided by Doppler Velocity Log (DVL). There are two possible correction procedures to obtain correction step in navigation filter. One is precise distance measurements from known nodes and the other is in the AUV position measurements from the base ship and data transferred via communication channel back to vehicle. In addition, the detection and analysis of the vehicle surrounding for the support in the precise navigation, cartography terrain analysis, etc. is very important aspect in AUV exploitation. There are many instruments that can be used in acquiring data of the surrounding. For example laser, photo camera, thermal camera, sonars, bottom sampling and many more depending on the mission. Very important is identify good working condition for each sensor, knowing precise position (underwater GIS integration) and synchronizing all incoming data to a single pool. Such data are of high quality and can be used as very reliable data source in post processing step supporting the right decision in further underwater missions.
TS1.11 Language Lessons
The Slovene language course will enable the participants to learn the Slovene language at the 'survival' level. It will focus on topics and activities that are relevant to language learners at the beginning stages of learning a new language: introducing oneself, naming people and objects, describing daily activities, describing a location, food and drink, at a hotel, and at a university.
TS1.12 Intermediate Project (IHU)
The development of the so called Intermediate project by the students is actually a procedure of elaborating a medium sized project starting right after the end of the first educational period (Time Slot 1), as a course TS1.12. The students, assigned to IHU, will have to develop two waterproof sensor cluster apparatus with a land based data acquisition module. Each apparatus will be able to detect physical phenomena such as temperature, pressure, pH, dissolved oxygen, electrical conductivity and oxygen reduction potential in order to detect water pollution and contaminates leakage from ships or waterways.
TS1.12 Intermediate Project (FMTS)
The course will focus on the analysis of the marine control systems (motion control, positioning, maneuvering, machinery systems and propulsion systems) of ships, underwater vehicles and floating marine structures. Basic marine electronic control systems will be described, like the electric power generation & management, steering, thruster and propulsion systems etc.
TS2.1 Remote sensing and positioning
The course focuses on teaching methods of positioning and controlling the movement of a ROUV, familiarizing students with types of positioning systems. The course aims to familiarize students with the theoretical and practical principles and concepts underlying the remote sensing technology and positioning through a wide range of applications in many different sectors. They will also reflect on good practice and understand the key policies, strategies and infrastructures that apply to the effective and appropriate use of these technologies. Finally, students will learn to apply these skills to real problems.
TS2.2 Distributed ledgers - Blockchain
This subject is focused on presenting this new technology and its features (reliability, transparency, security). The fundamentals of this technology and the potential of its application in the Future Marine Engineering & Maritime Surveying are shown including the traceability of routes/cargo, immutable register of actions/samples/procedures, use of smart contracts for automation of operations/port interactions, management of legal/security obligations (personnel, authorizations, public agencies control etc.)
TS2.3 Lightweight materials
The course will touch the industrial trend of using lightweight materials for ship building, emphasizing in the production & repair of composite (polyester/epoxy-glass fiber) ships to reduce weight and increase fuel efficiency. Glass-fibre or Carbon-fibre reinforced polymers (CFRP) for frame & panels and pressurized gas tanks are technologies that will be presented in the course. Topics on the specific materials used for ship mass reduction, their properties, manufacturing techniques and handling, as well as comparison with corresponding properties of more conventional materials will be covered.
TS2.4 Underwater communications & navigation
The topic focuses on the underwater navigation of a ROUV. Starting from point-to-point underwater communication and going to underwater communication networks, mostly based on acoustic waves, it provides an insight to the way modern underwater vehicles navigate. Semi-autonomous and autonomous route design will be discussed. Another key navigation concept that will be taught is inertial navigation. This is essential when it is impossible to rely solely on positioning with external reference. Inertial positioning is the key for safe operation of underwater vehicles. Inertial positioning sensors differ significantly in precision and reliability as they operate using different principles: mechanical, laser or MEMS gyroscopes and different accelerometers. They have a long history of use, from high end devices in aerospace industry to cell phones with simple MEMS sensors. The course will include introduction to different inertial sensors, principles of operation and impact of errors that are summed and integrated with time. Noise filtering and error minimization algorithms will also be presented.
TS2.5 Data processing
Interpretation of the data acquired through sensoring system will automate the marine environment evaluation. In this topic, possible ways of achieving such automation will be analysed taking into account the particularities of the signal parameters coming from sensors. Insight to important data processing techniques and technologies of data fusion for extracting conclusions through a multi-sensoring system will be performed.
TS2.6 Geographic information systems
The main topics of this lesson deal with calculating the reference origin, learning about position reference systems and spatial mapping. Students will learn different coordinate systems, common projected coordinate systems, and become familiar with environmental variables. They will learn GIS concepts, terminologies, data types and manage data saved in spatial databases. They will conduct advanced geoprocessing analyses using dedicated GIS applications. Particular exercises will be executed in sea floor mapping and 3D navigational charting.
TS2.7 Underwater physics
The course would present basic physical quantities, which reflect the underwater remote controlled robot on its mission. Underwater sound propagation sensitivity, forward scattered acoustic field aberration and Doppler shift give the observer basic data for exploration. To get the robotic vehicle's operator awareness, a robust testing and deployment should be applied.
TS2.8 Entrepreneurship
This course is an introduction to the basic principles of identifying innovation & entrepreneurial opportunities, creating a business plan, securing financial backing and coordinating business growth. Students will learn the theory and practice of entrepreneurship, frameworks for creating a viable business and how to foster a culture of innovation to help an innovative business stay ahead.
TS2.9 Business administration
This course will provide students with an insight to business management focusing on the maritime/surveying industry. A basic understanding of the role and functions of a manager and an introduction to the various philosophies, theories and techniques they use to carry out their work will be given. Furthermore, a general overview of the planning process of business strategies, strategic thinking and the formation, implementation and evaluation of strategy is provided.
TS2.10 Maritime legal arrangement
The aim of this course is to provide knowledge of maritime legislation, such as international maritime law (protection and preservation of the marine environment, scientific research of the sea, dispute resolution), as well as the specific nature of maritime insurance, legislation conflicts and maritime labour law.
TS2.11 Language Lessons
Although the course will be taught in English, language lessons will be provided to enable the participants to immerse in the local culture of the place they will visit during the exchange periods.
TS2.12 Tool Demonstrator (IHU)
The development of the so called Developing Tool Demonstrator by the students is actually a procedure of elaborating a medium sized project starting right after the end of the second educational period (Time Slot 2), as a course TS2.12. The course will present to the IHU participating students the modern world of ROUVs. Besides a limited theoretical part, the course will be purely experimental. The remotely operated underwater vehicle (ROUV) measurement system, developed by IHU, will be used by the students as a platform to install the sensor cluster apparatus, developed during the Intermediate Project (TS1.12). The assembly will be guided by the instructor. The students will write the necessary code to connect the ROUV guidance system with the sensor cluster, develop a user interface and send the data to the eLearning Platform. The students will use the ROUV to perform an underwater inspection of ship hulls to detect possible leakages and waterway quality. A selected range of subtasks will be performed by students working individually or in groups.
TS2.12 Tool Demonstrator (FMTS)
The course will present to the IHU participating students the modern world of ROUVs. Besides a limited theoretical part, the course will be purely experimental. The remotely operated underwater vehicle (ROUV) measurement system, developed by IHU, will be used by the students as a platform to install the sensor cluster apparatus, developed during the Intermediate Project. The assembly will be guided by the instructor. The students will write the necessary code to connect the ROUV guidance system with the sensor cluster, develop a user interface and send the data to the eLearning Platform. The students will use the ROUV to perform an underwater inspection of ship hulls to detect possible leakages and waterway quality. A selected range of subtasks will be performed by students working individually or in groups.